Wentao Zhang (张文涛)
 Greetings! I am a robotics enthusiast driven by the ambition to build agile, safe, and intelligent mobile robotic systems that empower and support human life. My journey aims far beyond the horizon — toward the vast possibilities of the future. More concretely, my research lies at the intersection of robotics, planning, optimization, and control. I work with both model-based and model-free approaches to develop robots that are not only theoretically sound but also practically impactful — robots that can truly assist and collaborate with humans in everyday life.
Greetings! I am a robotics enthusiast driven by the ambition to build agile, safe, and intelligent mobile robotic systems that empower and support human life. My journey aims far beyond the horizon — toward the vast possibilities of the future. More concretely, my research lies at the intersection of robotics, planning, optimization, and control. I work with both model-based and model-free approaches to develop robots that are not only theoretically sound but also practically impactful — robots that can truly assist and collaborate with humans in everyday life.
Welcome collaboration and discussion.
News
- Jun. 2026: Participated in ICRA 2026 (Vienna, Austria). Happy to share recent research in AI-DRIVEN SAFE AERIAL ROBOTICS workshop and ICRA poster session.
- Oct. 2025: On paper (1st author) has been accepted by RA-L,a nice end of my master's journey
- Oct. 2025: Start my PhD journal in DRAGON Lab. Happy to meet nice people in here
- Jun. 2025: Start my internship on Shanghai AI Lab. Very happy to join in the excellent gropu (Embodied AI Center)
- Jun. 2024: Two paper (1st, 2nd author) have been accepted by IROS 2024.
- May. 2024: Participated in ICRA 2024 (Yokohama, Japan). Honorary to present an Oral Presentation!
- Jan. 2024: Three co-authored papers have been accepted by ICRA 2024. Very happy that one of it earned Finelist for Best Conference Paper Award
Internship

Shanghai AI Laboratory
June. 2025 - Oct. 2025 OpenRobotLab, Shanghai, China
Closely worked with Jingbo Wang
Topic: Whole-body Humanoid-Object Interaction
Education

University of Tokyo, Tokyo, Japan
Oct. 2025 - Future Doctor Student of Mechanical Engineering
Supervisor: Assoc. Prof. Moju Zhao
Topic: Articulated-Aerial Robot, Motion Planning and Control
Huazhong University of Science and Technology, Wuhan, China
Step. 2022 - June. 2025 Master Student of Control Science and Engineering
Supervisor: Prof. Lijun Zhu
Topic: Quadruped Robot, Motion Planning and Control

Academic Service
Reviewer T-RO, RA-L, CoRL, ICRA, IROS
Awards & Honors
• Huazhong University of Science and Technology Outstanding Graduate (2025)
• Finalist for the Best Conference Paper Award (ICRA-2024)
• Finalist for the Best Student Paper Award, and (ICRA-2024)
• Finalist for the Best Paper Award on Multi-Robot Systems (ICRA-2024)
• Xiaomi Scholarship for Postgraduate Students (2023)
• Northeastern University Outstanding Graduate (2022)
• Northeastern University Outstanding Graduation Thesis (2022)
• National Inspiration Scholarship for Undergraduates (2020, 2021)
• National Scholarship for Undergraduates (2019)
Selected Research
Abstract
Tilt-rotor aerial robots enable omnidirectional maneuvering through thrust vectoring, but introduce significant control challenges due to the strong coupling between joint and rotor dynamics. While model-based controllers can achieve high motion accuracy under nominal conditions, their robustness and responsiveness often degrade in the presence of disturbances and modeling uncertainties. This work investigates reinforcement learning for omnidirectional aerial motion control on over-actuated tiltable quadrotors that prioritizes robustness and agility. We present a learning-based control framework that enables efficient acquisition of coordinated rotor-joint behaviors for reaching target poses in the SE(3) space. To achieve reliable sim-to-real transfer while preserving motion accuracy, we integrate system identification with minimal and physically consistent domain randomization. Compared with a state-of-the-art NMPC controller, the proposed method achieves comparable six-degree-of-freedom pose tracking accuracy, while demonstrating superior robustness and generalization across diverse tasks, enabling zero-shot deployment on real hardware.
Abstract
Deploying humanoid robots to interact with real-world environments—such as carrying objects or sitting on chairs—requires generalizable, lifelike motions and robust scene perception. Although prior approaches have advanced each capability individually, combining them in a unified system is still an ongoing challenge. In this work, we present a physical-world humanoid-scene interaction system, PhysHSI, that enables humanoids to autonomously perform diverse interaction tasks while maintaining natural and lifelike behaviors. PhysHSI comprises a simulation training pipeline and a real-world deployment system. In simulation, we adopt adversarial motion prior-based policy learning to imitate natural humanoid-scene interaction data across diverse scenarios, achieving both generalization and lifelike behaviors. For real-world deployment, we introduce a coarse-to-fine object localization module that combines LiDAR and camera inputs to provide continuous and robust scene perception. We validate PhysHSI on four representative interactive tasks—box carrying, sitting, lying, and standing up—in both simulation and real-world settings, demonstrating consistently high success rates, strong generalization across diverse task goals, and natural motion patterns.
Abstract
Inspired by the utilization of dogs in sled-pulling for transportation, we introduce a cable-trailer system with a quadruped robot. The motion planning of the proposed robot system presents challenges arising from the nonholonomic constraints of the trailer, system underactuation, and hybrid interaction through the cable. To tackle these challenges, we develop a hybrid dynamics model that accounts for the cable’s taut/slack status. Since it is computationally intense to directly optimize the trajectory, we first propose a search algorithm to compute a sub-optimal trajectory as the initial solution. Then, a novel collision avoidance constraint based on the geometric shapes of objects is proposed to formulate the trajectory optimization problem for the hybrid system. The proposed trajectory planning method is implemented on a Unitree A1 quadruped robot with a customized cable-trailer and validated through experiments.
Abstract
Quadruped robots demonstrate robust and agile movements in various terrains; however, their navigation autonomy is still insufficient. One of the challenges is that the motion capabilities of the quadruped robot are anisotropic along different directions, which significantly affects the safety of quadruped robot navigation. This paper proposes a navigation framework that takes into account the motion anisotropy of quadruped robots including kinodynamic trajectory generation, nonlinear trajectory optimization, and nonlinear model predictive control. In simulation and real robot tests, we demonstrate that our motion-anisotropy-aware navigation framework could: (1) generate more efficient trajectories and realize more agile quadruped navigation; (2) significantly improve the navigation safety in challenging scenarios. The implementation is realized as an open-source package at agile_navigation (GitHub).
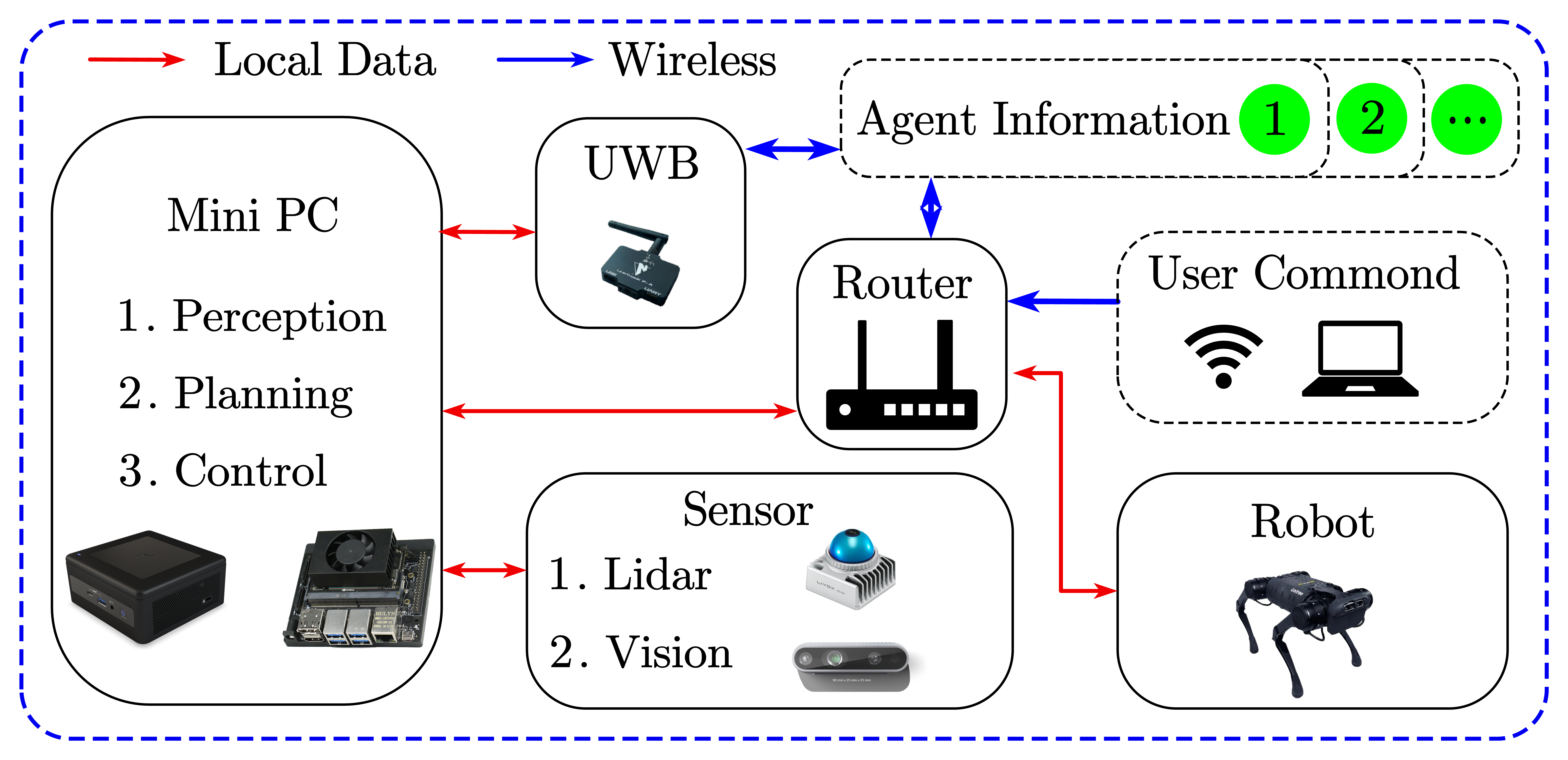
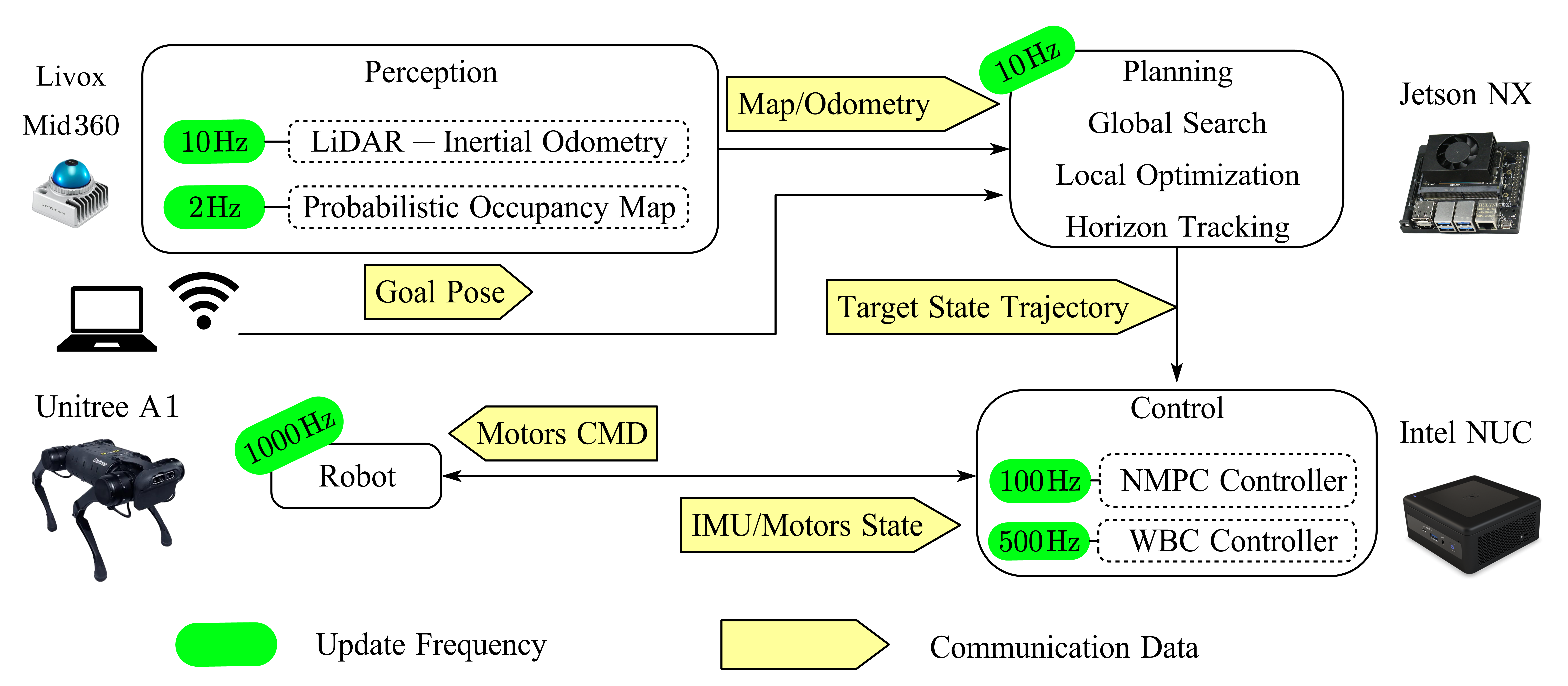
Abstract
We build a framework for mobiAfter multiple optimization iterations, we developed and deployed the complete navigation framework, encompassing both hardware and software. The hardware is characterized by its compactness and lightweight design. Meanwhile, the software integrates perception, planning, and control functionalities, facilitating the seamless deployment of various algorithms. Several of our projects leverage this framework, spanning quadruped robot navigation, formation control, collaboration, and flocking.