Multi-Robot Systems Planning Framework
Introduction
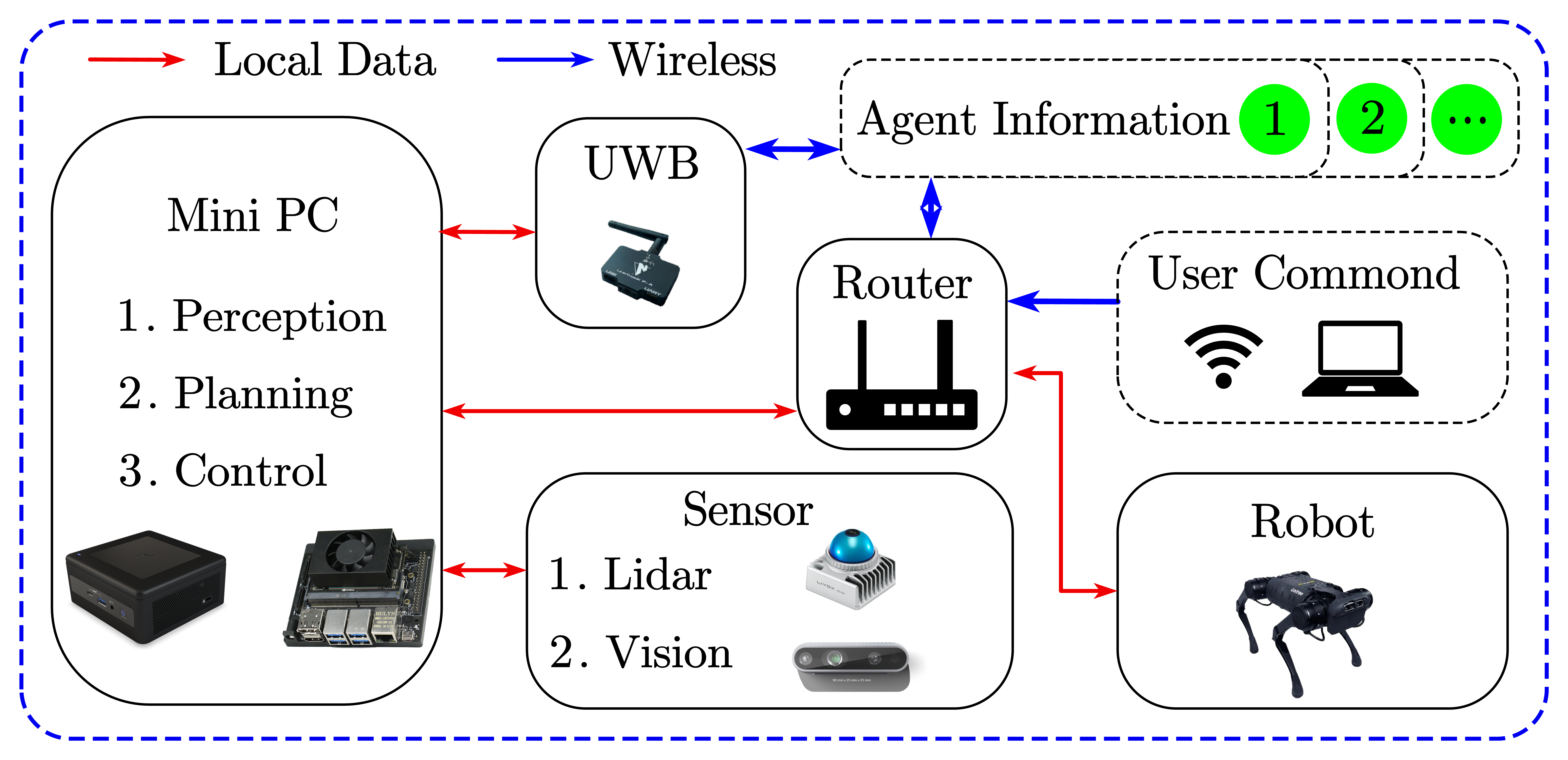
After multiple optimization iterations, we developed and deployed the complete navigation framework, encompassing both hardware and software. The hardware is characterized by its compactness and lightweight design. Meanwhile, the software integrates perception, planning, and control functionalities, facilitating the seamless deployment of various algorithms. Several of our projects leverage this framework, spanning quadruped robot navigation, formation control, collaboration, and flocking.

Framework
Research
Distributed Model Predictive Formation Control with Gait Synchronization for Multiple Quadruped Robots
 We present a fully distributed framework for multiple quadruped robots in environments with obstacles. It is notable that all the robots are able to avoid obstacles, navigate to the desired positions, and meanwhile synchronize the gaits.
We present a fully distributed framework for multiple quadruped robots in environments with obstacles. It is notable that all the robots are able to avoid obstacles, navigate to the desired positions, and meanwhile synchronize the gaits.
Optimization-Based Flocking Control and MPC-Based Gait Synchronization Control for Multiple Quadruped Robots
 We focus on the flocking control and gait synchronization control of multiple quadruped robots to achieve the movement during patrol tasks. To achieve these goals, we propose an optimization-based distributed flocking controller and a model predictive control (MPC)-based gait synchronization controller.
We focus on the flocking control and gait synchronization control of multiple quadruped robots to achieve the movement during patrol tasks. To achieve these goals, we propose an optimization-based distributed flocking controller and a model predictive control (MPC)-based gait synchronization controller.
Observer-based Distributed MPC for Collaborative Quadrotor-Quadruped Manipulation of a Cable-Towed Load (Finalist for the IEEE-ICRA2024 Best Conference Paper Award)
 We presents a collaborative quadrotor-quadruped robot system for the manipulation of a cable-towed payload. In particular, we aim to solve the challenge from the unknown dynamics of the cable-towed payload. The proposed system is validated through challenging field experiments in indoor and outdoor environments.
We presents a collaborative quadrotor-quadruped robot system for the manipulation of a cable-towed payload. In particular, we aim to solve the challenge from the unknown dynamics of the cable-towed payload. The proposed system is validated through challenging field experiments in indoor and outdoor environments.