Agile and Safe Trajectory Planning for Quadruped Navigation with Motion Anisotropy Awareness
Introduction
Quadruped robots demonstrate robust and agile movements in various terrains; however, their navigation autonomy is still insufficient. One of the challenges is that the motion capabilities of the quadruped robot are anisotropic along different directions, which significantly affects the safety of quadruped robot navigation. This paper proposes a navigation framework that takes into account the motion anisotropy of quadruped robots including kinodynamic trajectory generation, nonlinear trajectory optimization, and nonlinear model predictive control. In simulation and real robot tests, we demonstrate that our motion-anisotropy-aware navigation framework could: (1) generate more efficient trajectories and realize more agile quadruped navigation; (2) significantly improve the navigation safety in challenging scenarios. The implementation is realized as an open-source package at ZWT006/agile_navigation: Quadruped Robot Planning ROS Package (github.com)
A preprint of the paper is available at arXiv, which is accepted by IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
Method
We proposed a hierarchical planning framework that specifically addresses the omnidirectional motion anisotropy (OMA) in different level. 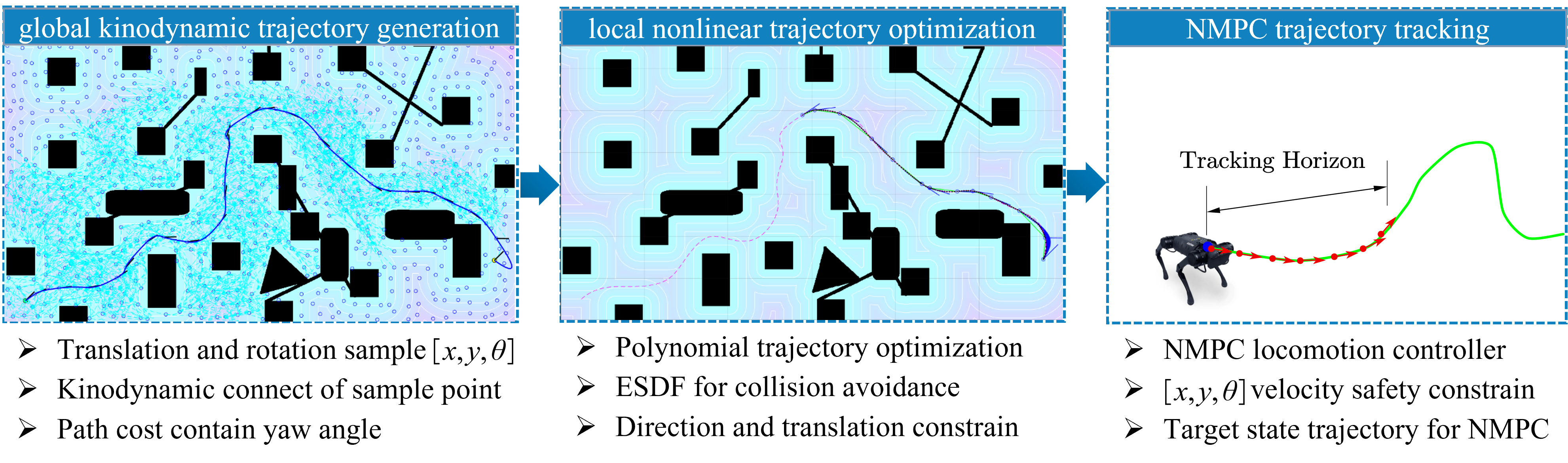
Framework
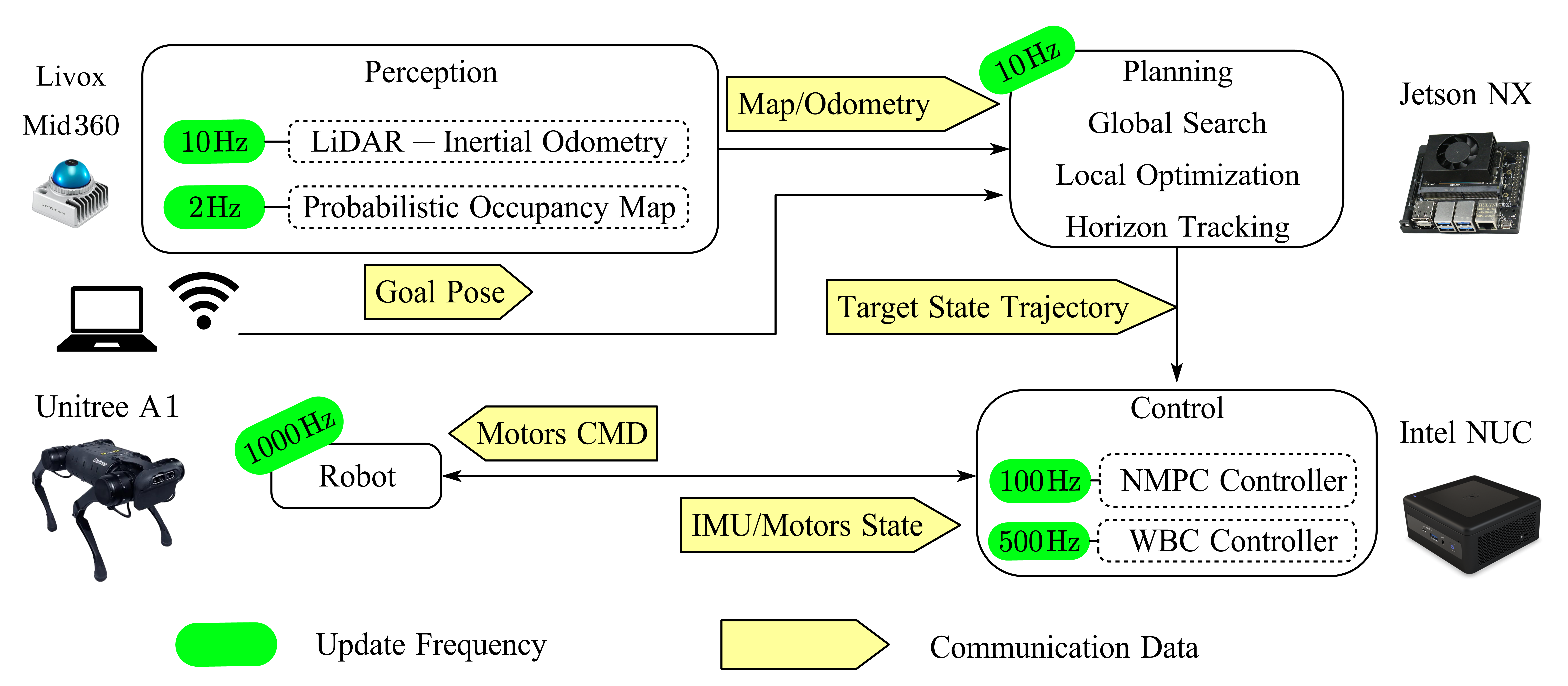
Our planning framework is implemented in C++ with ROS as a communication middleware. For numerical solving of NTO problem, we utilize the general optimization solver NLopt and employ the gradient-based local optimization method MMA(Method of Moving Asymptotes).
Real-world result (calculated with Lidar-Odometry FAST_LIO):
\[v_{\max}=2.87\mathrm{m}/\mathrm{s},\omega _{\max}=2.22\mathrm{rad}/\mathrm{s}\]